中国科大物理系袁军华、张榕京课题组通过联合使用细菌三维追踪技术与鞭毛丝动态荧光观察技术,发现了铜绿假单胞菌(Pseudomonas aeruginosa)的新游动模式。该研究结果于2022年3月29日发表在PNAS上[PNAS 119,e2120508119 (2022)]。
细菌运动是其生存和感染宿主的关键。细菌通过游动模式之间的交替转换来探索环境。不同于周身多鞭毛的大肠杆菌,铜绿假单胞菌是一种典型的极性单鞭毛细菌,其单根鞭毛位于杆状胞体一端。在可旋转鞭毛马达的驱动下,铜绿假单胞菌在液体中实现游动模式切换:鞭毛逆时针旋转时推动胞体前进,鞭毛顺时针旋转时拖曳胞体后退。传统认为铜绿假单胞菌通过交替“前进-后退”的方式实现环境探索,中间或许间隔着短暂的停顿。然而此方式下细菌游动方向的改变主要源自布朗转动扩散引起的胞体方向波动,因此对环境探索的效率不高。细菌经过亿万年的进化,会不会有更高效的方式来探索环境呢?

图1.细菌游动的明场及荧光图像。虚线代表细菌胞体,亮色代表荧光标记的鞭毛丝,白色箭头代表细菌游动方向。
课题组借助基因编辑手段改进了铜绿假单胞菌的鞭毛丝荧光标记效率,在该细菌中实现了游动三维追踪及鞭毛丝动态行为的同步观测,从而发现了一种全新游动模式(如图1,称之为“wrap”模式),并且进一步揭示了此模式发生的物理机制。鞭毛顺时针转动时,拖曳胞体后退,当鞭毛变成逆时针转动时,鞭毛丝靠近胞体的连接部件(钩形鞘,hook)在两端压力的作用下发生力学屈曲失稳,使得鞭毛丝缠绕在胞体上,形成wrap态。在这种状态下,胞体取向不稳定从而容易发生转向。Wrap态下屈曲的钩形鞘两端受拉力作用,经过短暂间隙后(平均1秒)鞭毛丝从胞体解离,恢复成前进态(如图2)。因此,wrap态发生在由后退态切换到前进态的过程中,经统计其发生概率约40%。通过比较“后退-前进”及“后退-wrap-前进”这两种方式下游动方向改变的统计分布,课题组发现wrap态使得细菌游动方向的改变随机均匀地分布在4pi立体空间,从而极大地提高了细菌探索环境的效率,另外通过对细菌趋化游动的随机动力学模拟亦确证了wrap态在提升细菌趋化水平上的效力。
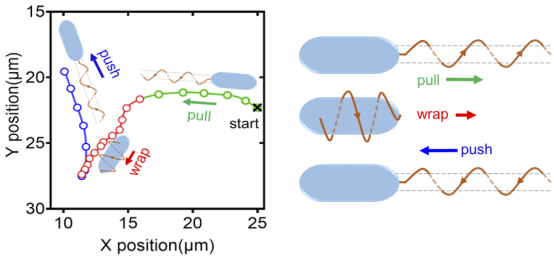
图2. 铜绿假单胞菌游动新模式。(左)图1细菌的游动轨迹示意图,不同颜色代表不同游动模式。(右)三种游动模式下鞭毛丝的状态。
在自然界中存在种类丰富的极性鞭毛细菌,课题组发现的游动新模式可能在极性鞭毛细菌中广泛存在。此处发现的由钩形鞘力学屈曲失稳来实现游动方向改变的物理机制,对设计人工微纳机器也有启发。
课题组博士生田茂瑾、武征宇是本文共同第一作者。上述研究得到了国家自然科学基金委、科技部、合肥大科学中心协同创新培养基金的支持。
论文链接:
https://www.pnas.org/doi/10.1073/pnas.2120508119